Note
Click here to download the full example code
Matching and tracking bats in a cave
Here let’s use some more experimental data to find 2D correspondences, and finally 3D paths for 2-3 bats seen flying together in a cave.
import matplotlib.pyplot as plt
import mat73
import numpy as np
import pandas as pd
from track2trajectory.projection import calcFundamentalMatrix
from track2trajectory.match3d import match_2dpoints_to_3dtrajectories
from track2trajectory.match2d import generate_2d_correspondences
from track2trajectory.camera import Camera
from track2trajectory.projection import project_to_2d
from track2trajectory.synthetic_data import make_rotation_mat_fromworld, get_cam_coods
from track2trajectory.dlt_to_world import transformation_matrix_from_dlt, cam_centre_from_dlt
# sphinx_gallery_thumbnail_path = '_static/bats3dtraj.png'
threecam_xy = pd.read_csv('DLTdv8_data_p000_15000_3camxypts.csv')
def reformat_dltdv_frame(dltdv_df, camname, camnum):
'''
'''
cam_cols = [dltdv_df.loc[:,column] for column in dltdv_df.columns if camname in column]
horizontal_concat = pd.concat(cam_cols,1)
unique_points = np.unique([each.split('_')[0] for each in horizontal_concat.columns])
point_subdfs = []
for point in unique_points:
ptx = point + '_'+camname+'_X'
pty = point + '_'+camname+'_Y'
subdf = dltdv_df.loc[:,[ptx,pty]]
subdf = subdf.rename(columns={ptx: "x", pty: "y"})
subdf['frame'] = np.arange(dltdv_df.shape[0])
subdf['oid'] = camname +'-'+point
subdf['cid'] = camnum
point_subdfs.append(subdf)
formatted_df = pd.concat(point_subdfs,axis=0).reset_index(drop=True)
return formatted_df
cam1_xy = reformat_dltdv_frame(threecam_xy, 'cam1', 1)
cam2_xy = reformat_dltdv_frame(threecam_xy, 'cam2', 2)
cam3_xy = reformat_dltdv_frame(threecam_xy, 'cam3', 3)
camera image is 640 x 512
px,py = 320, 256
fx, fy = 526, 526 # in pixels
Kteax = np.array([[fx, 0, px],
[0, fy, py],
[0, 0, 1]])
# distortion coefficients
p1, p2 = np.float32([0,0]) # tangential distortion
k1, k2, k3 = np.float32([-0.3069, 0.1134, 0]) # radial distortion
dist_coefs = np.array([k1, k2, p1, p2, k3]) #in the opencv format
same undistortion to all of them.
fname = '2018-08-17_wand_dvProject.mat'
matfile = False
if matfile:
data_dict = mat73.loadmat(fname)
dltcoefs = data_dict['udExport']['data']['dltcoef']
else:
dltcoefs = pd.read_csv('2018-08-17_wand_dltCoefs.csv', header=None).to_numpy()
c1_dlt, c2_dlt, c3_dlt = [dltcoefs[:,col] for col in [0,1,2]]
def extract_P_from_dlt_v2(dltcoefs):
'''No normalisation
'''
dltcoefs = np.append(dltcoefs, 1)
dltcoefs = dltcoefs
P = dltcoefs.reshape(3,4)
return P
# generate projection matrix
Pcam1 = extract_P_from_dlt_v2(c1_dlt)
Pcam2 = extract_P_from_dlt_v2(c2_dlt)
Pcam3 = extract_P_from_dlt_v2(c3_dlt)
# also get the rotation and translation data - placed in the cam->world frame
def make_transformation_matrix_from_dlt(dltc):
'''
'''
t11, z11, _ = transformation_matrix_from_dlt(dltc)
shifter_mat = np.row_stack(([1,0,0,0],
[0,1,0,0],
[0,0,-1,0],
[0,0,0,1]))
shifted_rotmat1 = np.matmul(t11, shifter_mat)[:3,:3]
Tmat = make_rotation_mat_fromworld(shifted_rotmat1, t11[-1,:3])
return Tmat
T1cam = make_transformation_matrix_from_dlt(c1_dlt)
T2cam = make_transformation_matrix_from_dlt(c2_dlt)
T3cam = make_transformation_matrix_from_dlt(c3_dlt)
cam1C = cam_centre_from_dlt(c1_dlt)
cam2C = cam_centre_from_dlt(c2_dlt)
cam3C = cam_centre_from_dlt(c3_dlt)
Generate camera objects and also remember to get the relevant rotation and translation matrices in the camera->world frame.
c_x, c_y, f, f_x, f_y = 320, 256, 526, 526, 526
cam1 = Camera(1, [0,0,0], 526, c_x, c_y, f_x, f_y, Kteax, T1cam[:3,-1], T1cam[:3,:3],
dist_coefs, [], Pcam1)
cam2 = Camera(2, [0,0,0], 526, c_x, c_y, f_x, f_y, Kteax, T2cam[:3,-1], T2cam[:3,:3],
dist_coefs, [], Pcam2)
cam3 = Camera(3, [0,0,0], 526, c_x, c_y, f_x, f_y, Kteax, T3cam[:3,-1], T3cam[:3,:3],
dist_coefs, [], Pcam3)
F13 = calcFundamentalMatrix(cam1, cam3)
F12 = calcFundamentalMatrix(cam1, cam2)
F23 = calcFundamentalMatrix(cam2, cam3)
threed_matches = match_2dpoints_to_3dtrajectories(cam1, cam2,
cam1_xy,
cam2_xy, F12,match_method='3dbackpred')
Compare the readings with the groundtruth known
df = pd.read_csv('DLTdv8_data_p000_15000_3camxyzpts.csv')
pt3d_bycam = threed_matches.groupby('c1_oid')
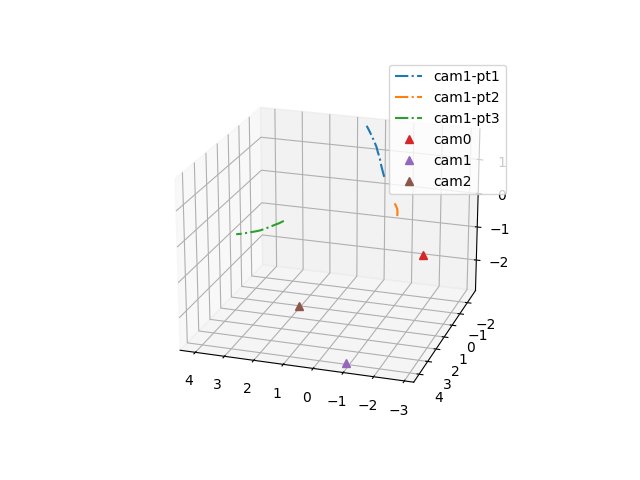
plt.figure()
a0 = plt.subplot(111 ,projection='3d')
a0.view_init(azim=108, elev=21)
for names in ['cam1-pt1', 'cam1-pt2', 'cam1-pt3']:
p1 = pt3d_bycam.get_group(names)
plt.plot(p1['x'],p1['z'],p1['y'],'-.',label=names)
for i,each in enumerate([cam1C, cam2C, cam3C]):
a,b,c = each
plt.plot(a,b,c,'^',label='cam'+str(i))
plt.legend()
plt.savefig('../docs/source/_static/bats3dtraj.png')
Total running time of the script: ( 0 minutes 0.000 seconds)